Command encoder signal connection
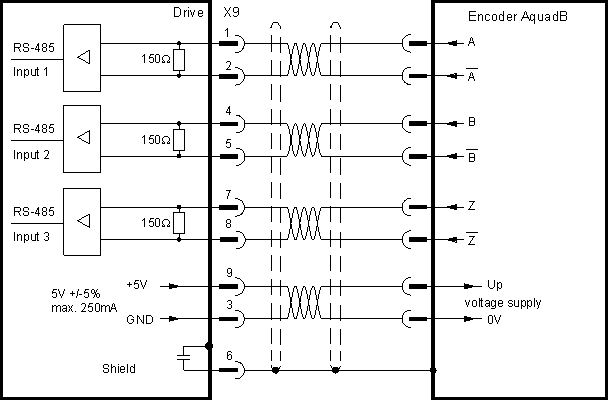
Incremental encoder input 5 V (X9)
A 5 V A quad B encoder, or the encoder emulation output of another drive can be connected to this input and used as a commander encoder, dual loop feedback, gearing or camming input. Parameter setting FB2.MODE = 0, FB2.SOURCE=1.

|
Don't use for primary motor feedback connection! |
Connection Diagram
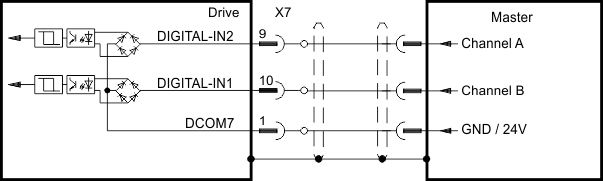
Incremental encoder input 24 V (X7)
A 24 V A quad B encoder can be connected to the digital inputs 1 and 2 and used as a commander encoder, dual loop feedback, gearing or camming input.
Parameter setting FB2.MODE = 0, FB2.SOURCE=2.
|
|
Don't use for primary motor feedback connection! |
Connection Diagram
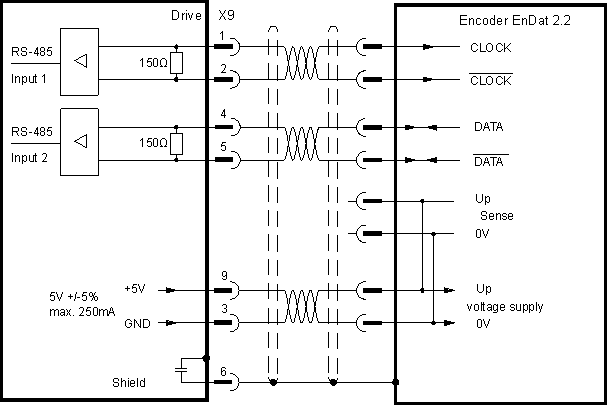
Encoder with EnDat 2.2 input 5 V (X9)
A single-turn or multi-turn encoder with EnDat 2.2 can be connected to this input and used as a commander encoder, dual loop feedback, gearing or camming input.
Parameter setting FB3.MODE=0, DRV.EMUEMODE=11.
-
- Can be used as primary motor feedback connectio
|
|
Can be used as primary motor feedback connectio |
Connection Diagram